 |  | |||
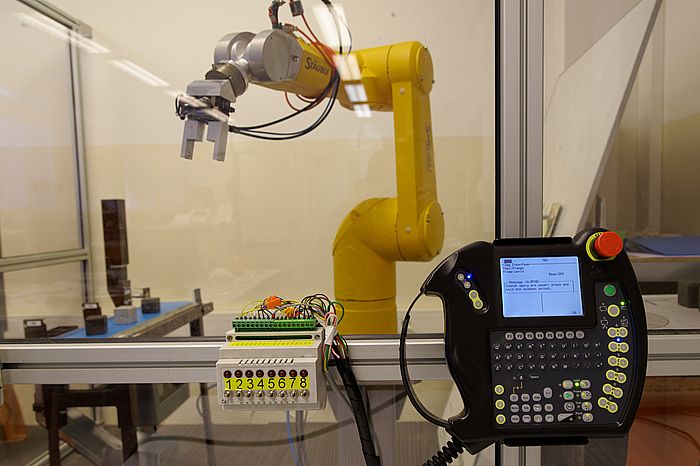 |  |
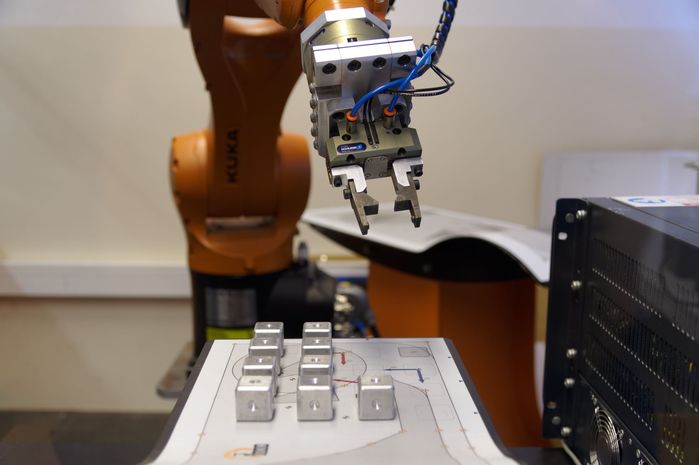
Laboratorium Robotyki Przemysłowej dedykowane jest do celów dydaktycznych i projektowych związanych z nauczaniem podstaw robotyki, programowania robotów manipulacyjnych, integracji systemów automatyki i robotyki. W laboratorium znajduje się łącznie 9 stanowisk dydaktycznych z komputerami PC w różnych konfiguracjach sprzętowych i programowych w zależności od ich specyfiki. Konfiguracje komputerów to 3x Intel Core i5-4690, 5x AMD A8-3870, 1x AMD Sempron 2600+, 1-4GB RAM, 500GB HDD z systemami Windows/Linux oraz podstawowym oprogramowaniem Matlab/Simulink, Visual Studio. Cztery stanowiska wyposażone są w manipulatory przemysłowe, w tym do dyspozycji są dwa roboty KUKA KR6 R900sixx Agilus wraz z dodatkowymi szafami sterowniczymi z komputerami przemysłowymi BECKHOFF i modułami wejść/wyjść cyfrowych. Jedno stanowisko z systemem manipulatora Staubli TX60L oraz jedno z Fanuc LRMate 200iD/7L. Na jednym ze stanowisk z robotem KUKA zamontowany jest system wizyjny OptiTrack w skład którego wchodzi 6 kamer Prime 13W i switch NETGEAR M4100-12G-POE+. Umożliwia on w połączeniu z biblioteką KUKA Sensor Interface implementacje szybkiego sprzężenia wizyjnego dla manipulatora. Jedno ze stanowisk wyposażone jest w przemysłowy system wizyjny OMRON Xpectia FZ2. Studenci mogą skorzystać z laboratorium podczas realizacji różnych projektów, w tym prac inżynierskich i magisterskich związanych z robotyką manipulacyjną.
W laboratorium prowadzone są między innymi następujące zajęcia laboratoryjne i projektowe:
• Podstawy robotyki - w trakcie zajęć laboratoryjnych studenci poznają budowę systemów manipulatorów przemysłowych, uczą się podstaw obsługi i programowania, przygotowują oraz testują proste programy ruchu manipulatorów.
• Modelowanie i sterowanie robotów - w ramach laboratorium studenci zapoznają się z obsługą i podstawami programowania robotów przemysłowych, przygotowują proste programy ruchu manipulatorów, realizują wybrane zadania z robotami mobilnymi dot. odometrii, generatora trajektorii, budowy prostej mapy otoczenia, analizują kinematykę wybranych układów manipulatorów.
• Integracja systemów automatyki - część laboratoryjna dotyczy zaawansowanego programowania systemów robotów przemysłowych w kontekście planowania zadań związanych z paletyzacją, odtwarzaniem złożonych ścieżek, parametryzacją ruchu z wykorzystaniem możliwości interakcji z otoczeniem poprzez dostępne moduły wejść/wyjść oraz programowania przemysłowych systemów wizyjnych. W części projektowej studenci realizują wybrane zadania związane z integracją sterowników robotów z innymi urządzeniami (systemy wizyjne, komputery przemysłowe, systemy mikroprocesorowe) z wykorzystaniem modułów I/O i interfejsów komunikacyjnych.
DIVISION OF CONTROL AND ROBOTICS (Z1)