 |  | ||||
 |  |
Laboratorium Zastosowań Robotyki w Medycynie przeznaczone jest zarówno do celów dydaktycznych jak i prac projektowo-badawczych z zakresu robotyki medycznej oraz aplikacji medycznych. W laboratorium znajduje się 5 stanowisk z komputerami PC w różnych konfiguracjach sprzętowych (3x Intel Core i5-3330, Intel Xeon E5-1620v3 + NVIDIA Quadro K620, Intel Core i5-4570) i programowych z systemami Windows i Linux, środowiskiem Matlab/Simulink, Visual Studio i innymi dedykowanymi aplikacjami.
W laboratorium zamontowano system wizyjny OptiTrack do lokalizacji obiektów w przestrzeni 3D za pomocą pasywnych znaczników mocowanych na obiektach. W skład systemu wchodzi 8 kamer Prime 17W i switch NETGEAR M4100-12G-POE+ łączący kamery z komputerem stanowiącym serwer wizyjny (Intel Xeon). Serwer wizyjny w sieci lokalnej udostępnia wyniki pomiarów do wybranych stanowisk komputerowych w laboratorium.
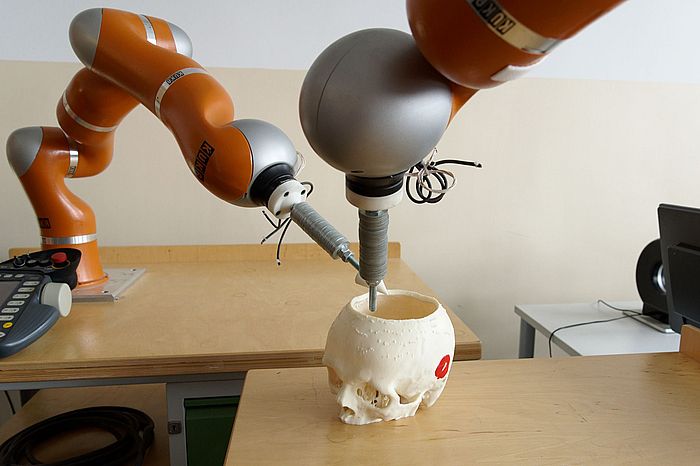
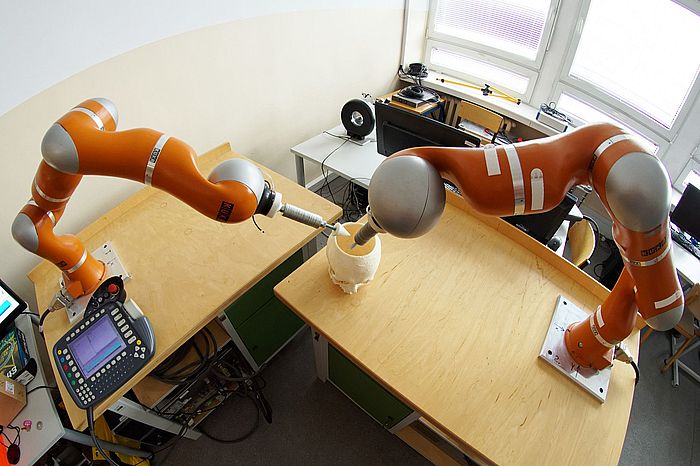
Na wyposażeniu laboratorium są dwa roboty KUKA Lightweight LBR4+ o 7 stopniach swobody z pomiarem sił w złączach i możliwością sterowania impedancyjnego. Roboty te wykorzystują do sterowania bibliotekę FRI (Fast Research Interface). Roboty KUKA przeznaczone są do prac projektowych i zajęć dydaktycznych. Jedno z robotycznych stanowisk KUKA dodatkowo wyposażono w czujnik sił i momentów JR3, kartę akwizycji obrazu Euresys Picolo oraz system laparoskopowy firmy Aesculap. Na trzech stanowiskach komputerowych można korzystać z konsol haptycznych ForceDimension Omega7.
W sali swoją siedzibę ma także koło naukowe RAI (Robotyka Automatyka Informatyka) będące jednym z trzech kół naukowych kierunku AiR. Do dyspozycji koła RAI są oscyloskopy, stacje lutownicze, mikroprocesorowe zestawy uruchomieniowe, robot mobilny gąsienicowy Boriss oraz drony.
W laboratorium znajduje się stanowisko projektowo-badawcze REHAB, jest to kompaktowy przenośny system rehabilitacyjny dla stawu kolanowego. W/w stanowisko zostało zbudowane w ramach projektu badawczo-rozwojowego NCBiR nr NR13-0028-13 w latach 2010-2014. Stanowisko REHAB przeznaczone jest do rehabilitacji stawu kolanowego chorych, u których prowadzono wydłużanie kości udowej z zastosowaniem aparatu Ilizarowa. Stanowisko składa się z trzech prototypów robotów rehabilitacyjnych oznaczonych jako REHAB A2, A3, A4. Dwa pierwsze uwzględniają staw kolanowy jako złącze o jednym stopniu swobody. W stanowisku REHAB A2, manipulator zamontowany jest na specjalnym statywie. Można go dostosować do pacjenta , który siedzi na zwykłym krześle. Stanowisko REHAB A3 jest manipulatorem, który wbudowany jest w specjalny fotel rehabilitacyjny. Natomiast REHAB A4 jest robotem rehabilitacyjnym uwzględniającym ruch osi obrotu stawu kolanowego.
Jeden z robotów KUKA LBR 4+ wraz z konsolą haptyczną ForceDimension Omega 7 wchodzi skład systemu badawczego o nazwie Otos-Robotic, który jest prototypem zrobotyzowanego systemu do wspomagania zabiegów chirurgicznych. Stanowisko Otos-Robotic przeznaczone jest do wspomagania chirurga w trakcie różnych zabiegów chirurgicznych (np. usuwania usznopochodnego ropnia mózgu).
Na w/w stanowiskach były realizowane prace dyplomowe zarówno inżynierskie jak i magisterskie.
W laboratorium prowadzone są następujące zajęcia laboratoryjne i projektowe:
Zastosowania robotyki w medycynie - studenci na zajęciach realizują projekty badawcze z szeroko rozumianej bioinżynierii np. modelowanie i symulacja układu mięśniowo-szkieletowego, wykorzystanie robota KUKA LBR4+ do sterowania torem wizyjnym w zabiegach laparoskopowych, projektowanie w środowisku CAD prostych manipulatorów medycznych, analiza chodu za pomocą systemu wizyjnego OptiTrack, analiza zdjęć RTG stawu kolanowego i jego modelowanie, sterowanie robotem rehabilitacyjnym.
Robotyka kooperatywna - studenci na zajęciach realizują zadania związane z współpracą pomiędzy robotami oraz współpracą robota z człowiekiem. Uwzględnione są zagadnienia związane z bezpieczeństwem konstrukcji i sterowania w otoczeniu człowieka (manipulatory elastyczne, sterowanie siłowe, unikanie kolizji), jak i sterowania przy wykorzystaniu danych biometrycznych człowieka (wykorzystanie sygnału EMG, system Mocap, sprzężenie haptyczne).